
In the first post on Einstein’s relativity, we discussed the discoveries and theories which served as the precursors to Einstein’s work. The most significant of these is Newton’s own version of relativity, now dubbed ‘Newtonian relativity’. Before we continue a discussion of the speed of light and how it relates to Einstein’s work, it will be useful to go into a little more detail about Newtonian relativity and conclusions which can be drawn from it.
So what is ‘Newtonian relativity’, exactly? Newton, in his own words, introduced it in a rather roundabout way; in modern parlance, we may summarize it as:
The laws of physics (mechanics) are the same for any observer moving at constant speed.
In other words, we all play by the same physical rules, whether we are ‘moving’ or ‘standing still’. Indirectly, this tells us that there is no such thing as absolute motion: if there is no physical experiment which can distinguish between an experimenter moving at (absolute) constant speed or sitting at (absolute) rest, the term ‘absolute motion’ has no meaning. The only motion that matters is relative motion between objects.
There are a few observations we can immediately make about ‘Newtonian relativity’. First of all, we emphasize that Newton himself was only concerned with the physics of moving objects (i.e. mechanics), and said nothing about other physical laws, such as electromagnetism. A consistent physical theory of electromagnetism had not been formulated at Newton’s time. Second, it is to be noted that the definition above begs the question somewhat: What does ‘constant speed’ mean, if there is no such thing as absolute motion? Constant speed with respect to what? We will address this somewhat as we go on, and in fact it will play a big role in later posts. For now, we simply say that we ‘instinctively’ can tell the difference between, for instance, driving down the road at a constant speed and slamming on the brakes of the car.
To further understand what Newtonian relativity implies about the world, it is helpful to imagine an ‘alternate reality’ in which the laws of physics are not the same for every observer in constant motion. What might such a world look like? As mentioned in the previous post, Aristotle imagined that the natural state of an object is to return to a state of ‘absolute rest’. If the laws of physics worked in this way, an object in (absolute) motion would naturally experience a braking force which would attempt to make the object stop moving. Though Aristotle never formulated his theory mathematically, it is natural to expect that the force experienced would get stronger the faster one moved. We would evidently have a way of distinguishing, by experiment, whether we are moving or not: we would simply measure the ‘braking force’ exerted on us as a measure of our current motion. No such braking force exists, however, and Newton surmised that no experiment would be otherwise able to detect absolute motion.
Up to this point, we’ve been using terms like ‘observer’ rather loosely. In anticipation of adding a little mathematics to the discussion, let’s define a few terms that will be applied consistently from now on…
Observer: An ‘observer’ is someone making measurements of physical phenomena. Typically we will pretend the observer is a person, though it could of course be a scientific apparatus as well. An observer carries with him two sets of tools for measuring motion: a clock, for measuring time, and a set of rulers, for measuring the position of objects. Using his rulers and clock, for instance, an observer could measure the distance Δx an object moves relative to him and divide by the amount of time Δt it takes for the object to travel that distance: the ratio of the two is the speed of the object:

Frame of reference: As all motion is taken to be relative, an observer only measures the positions of objects and their motions relative to himself. This ‘point of view’ of the observer is referred to as a ‘frame of reference’. Quantitatively, this frame of reference consists of the clock and set of rulers that a specific observer is using. For instance, I measure time using my own wristwatch, and I measure distances relative to where I am now.
Inertial frame of reference: When an observer is moving at a constant speed, they are said to be in an ‘inertial frame of reference’, i.e. a frame in which Newton’s law of inertia holds.
Event: Something that happens. In an idealized case, an ‘event’ happens at a single instant in time at a single point in space. A simple visual example of an event is the detonation of a firecracker. Different observers can measure the same event; each observer will use a different set of rulers and clocks to measure ‘when’ and ‘where’ the event occurs, but they will all be measuring the same thing (“Where were you when Kennedy was assassinated?”).
Coordinate system: We quantify measurements in a particular frame of reference using a coordinate system. Each observer measures the location of events in terms of four algebraic variables: x, y, z for spatial position (left/right, forward/backward, up/down) and t for time.
We can easily relate the behavior of objects, and events, as portrayed in different coordinate systems. In fact, most of us do this all the time without thinking about it formally. Consider a pair of cars driving down the expressway, and a third car stalled on the side of the road, as shown below*:
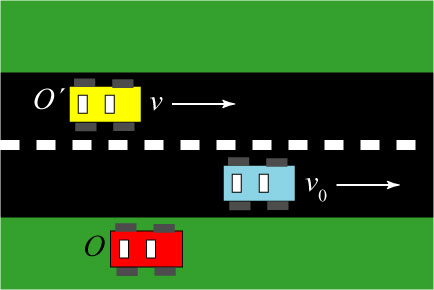
We have two observers in this picture: the ‘stationary’ observer O in the red car, and the moving observer O’ in the yellow car. The yellow car is moving at speed 



In words, the person in the yellow car sees the blue car moving to the left at 10 mph relative to him. This sort of transformation is referred to as a Galilean velocity transformation. Such a transformation can be used to relate the velocities of objects as observed in different reference frames. More generally, suppose observer O sees observer O’ moving at velocity 








To change from the ‘point of view’ of observer O to the point of view of observer O’, we simply subtract the velocity of observer O’ from every velocity of interest.
We may also write a Galilean transform for position. If x, y and z are the positions of an event according to observer O, and x’, y’ and z’ are the positions of an event according to an observer O’, then the positions are related by



There are several important things to note about these equations:
- The measurement of time is the same for observer O and observer O’: Newton assumed that there is an absolute measure of time. This means that every observer’s (perfect) clock runs at the same rate, no matter how they move. We will see that this is not true in reality.
- All observers agree on the spatial distance between two events. If one event happens at position
and another event happens at position
, observer O will say the two events were separated by a distance
. Using the Galilean transforms, we can readily show (assuming that the two events happen at the same time) that the observer O’ measures the same distance between events, i.e.
.
- We can derive the Galilean velocity transformations from these equations. Looking only at x, let us suppose two events which happen are separated by a distance
and a time interval
. We may then write, using the Galilean transform, that the two events are related by
. If we divide both sides of this equation by
. Finally, we note that velocity = distance/time, so the above equation results in the Galilean velocity transform for x.
With the Galilean velocity transforms, we’re in a position to explain, semi-mathematically, why Newton’s laws are the same for any observer moving at a constant velocity. The crux of Newton’s laws of motion is Newton’s famous second law,

Which says that a force F acting on an object produces an acceleration (change in velocity per unit time) equal to 
The best way to illustrate this is to look at a situation when observers disagree on the forces involved, because one of them is accelerating. Suppose we have a situation as illustrated below**. One observer is standing by the side of a set of railroad tracks, while another observer is sitting inside a closed railroad car. A pendulum is hanging from the ceiling of the railroad car.
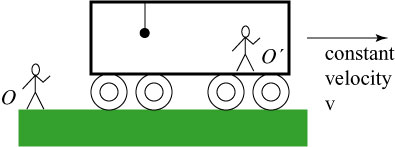
If the train is moving at constant speed, the observer inside the train car is in an inertial reference frame and feels nothing out of the ordinary. Both the observer by the side of the train and the observer inside agree that there are no forces acting on the train car (except, of course, gravity).
Now suppose the train is accelerating, i.e. it is increasing its speed rapidly.
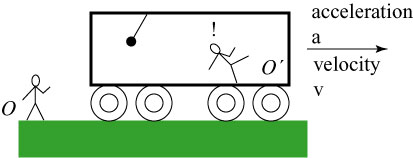
The person outside of the train will say that there is a force acting on the train which is pulling it to the right. The person inside the train, however, thanks to Newton’s first law (things at rest remain at rest, things in motion tend to remain in motion), will feel himself sliding towards the rear of the train car – the train is being pulled out from under him! The pendulum will be hanging at an angle, because the support of the pendulum is being pulled away from the pendulum as well. The person in the train, without any window to look out, can only conclude that a force is pulling him and everything inside the train car to the left.
The observer by the side of the tracks says a force is pulling the train to the right, while the person inside says that a force is pulling him to the left. They have a fundamental disagreement as to the actual physics occurring!
Such discrepancies are actually very familiar to most people. When you take a sharp turn around a corner in your car, you are pressed up against the side of the car by what seems to be an outward force, the ‘centrifugal force.’ In fact, you are a ‘victim’ of the law of inertia: your body wants to continue in a straight line, while your car is turning. An observer standing nearby will tell you that the actual force taking you around the turn is centripetal (inward). Centrifugal force is typically referred to as a pseudo-force: the turning of the car gives you the illusion that you are in fact being pushed against the side of the car. In reality, the car is pulling you around the turn!
Such discrepancies seem on the surface very troubling. Shouldn’t the laws of physics be the same no matter how an observer is moving? We will see, much later, that Einstein solved this problem as well, with his general theory of relativity. For now, we’ll stick to physical situations where the observers are in inertial reference frames.
So Newtonian relativity seems to work just fine; why does it in fact break down when electricity and magnetism get involved? Returning to Newton’s second law,
We have explained that the right-hand side of the equation is necessarily invariant under Galilean transformations. For forces of the form that Newton studied, such as gravity, the left-hand side of the equation is also invariant. The force of gravity only depends on the distance between two objects, and we have shown that the distance between two objects is the same for every observer.
However, the force a magnetic field exerts on a charged particle depends on the velocity of the particle! As we have seen, the Galilean transforms tell us that different observers will measure different velocities for an object. When studying magnetic fields, then, one finds that the left-hand side of Newton’s law depends upon what frame of reference one is traveling in. Different observers cannot measure different forces – as mentioned in the previous post, this would be akin to one person saying a car crash totaled both cars and another person saying that the crash was only a fender bender – so evidently we have reached a paradoxical situation. This paradox made scientists in the late 1800s/early 1900s suspect that, for magnetic forces, there was a ‘correct’ frame of reference (akin to Aristotle’s system of absolute rest). These scientists began to make measurements of the speed of light in an attempt to measure the Earth’s motion relative to this absolute rest frame. In the next post, we’ll give a brief historical background of measurements of the speed of light.
Whew! It’s tough to write physics posts without using calculus or vectors! If any readers have any questions, or anything seems unclear, feel free to leave me a comment!
Update: I should really note that, in spite of fact that Einstein’s theory supplanted Newton’s, Newton’s relativity is in essence correct: it accurately describes most terrestrial phenomena, as long as the relative speeds between objects are small. What Einstein showed is that Newton’s theory is a subset of a much broader relativistic formalism. We’ll be discussing this in more detail as these posts progress.
* As you can see, this picture clearly demonstrates that I majored in physics, not art…
** This example is inspired by a similar example in Tipler and Llewellyn’s textbook, Modern Physics.



I love science in my blood.
the entire universe is filled by dark matter &dark energy.
clusters of ordinary matter eg. galaxies are immersed in
Pingback: There Might Be More to Gravity Than We Thought – Perfectly Plain
Reconsideration on a Uniform Linear Motion
Without rest frame (absolute), a uniform linear motion cannot be describable.
http://www.geocities.co.jp/Technopolis/2561/eng.html
Sorry, I cannot receive E mail. I do not have PC.
Difference of the motion
Difference of inertial motion and accelerated motion will be difference of the motion relative to aether frame. And accelerated motion and inertial force are the front and back of a fact. Inertial force is not fictitious.
http://lifeafterdeath.vip/eng.html
Above is URL of my site.